https://www.youtube.com/watch?v=spUNpyF58BY
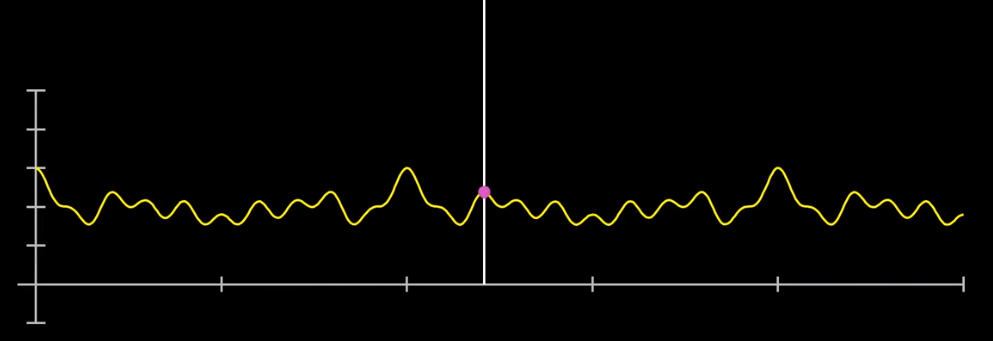
L’image ci dessus montre un graphique d’intensité sonore en fonction du temps. Comment faisons nous pour déterminer les différentes fréquences qui composent ce graphique? Tout d’abord, nous devons comprendre comment la superposition d’ondes sonores fonctionne. En effet, c’est beaucoup plus simple que vous le pensez!

https://www.youtube.com/watch?v=spUNpyF58BY
Comme vous pouvez observer, le graphique ci-dessus (pression en fonction du temps) nous montre deux fréquences différentes (Mauve = 294Hz || Jaune = 440Hz). Le graphique de couleur verte est la superposition des deux ondes. Nous pouvons observer qu’à certains endroits l’amplitude est très grande puisque c’est un temps qui coincide avec l’amplitude maximale des deux droites. À d’autres endroits l’addition des amplitudes s’annulent et crée une pression nulle. Comme nous pouvons voir, c’est simple de construire des graphiques à plusieurs fréquences. La question que nous nous posons ici c’est comment déduire les fréquences qui ont composé un graphique?

https://www.youtube.com/watch?v=spUNpyF58BY
Pour arriver à déduire la fréquence d’une onde complexe nous devons comprendre comment y arriver avec une onde prédéterminé. L’image ci-dessus nous montre une onde de 3Hz qui est divisé en 2 secondes. Un tour de cercle corresponds à deux secondes dans le graphique. Le centre du cercle corresponds à une intensité nulle et plus on s’éloigne du centre du cercle plus l’intensité est grande. Nous ne travaillons pas dans le négatif, puisque le centre du cercle ne correspondra plus au bas de l’onde.


https://www.youtube.com/watch?v=spUNpyF58BY
Quand nous changeons la valeur d’un tour de cercle (Le temps qui corresponds à un tour) le graphique résultant change aussi. (Afin de continuer les explications nous allons appeller la valeur d’un tour de cercle gamma.) Dans la deuxième image, nous observons une forme hors du commun puisque la valeur de gamma équivaut à la fréquence de l’onde. Hélas! Nous devons nous questionner sur cet effet.

https://www.youtube.com/watch?v=spUNpyF58BY&t=243s
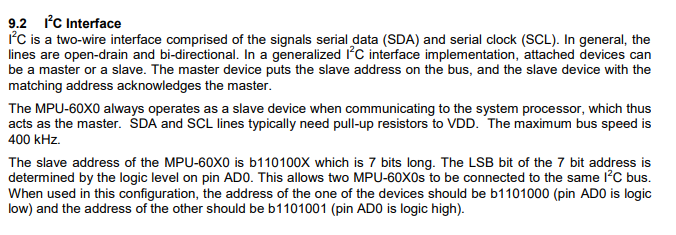
Avec le graphique et les informations que nous avons trouvé nous pouvons maintenant déduire la fréquence de l’onde. Pour ce faire, nous devons trouver le centre de la masse du graphique gamma. Pourquoi? Quand la valeur de gamma est égale à la valeur de la fréquence de l’onde, la valeur en X du centre de masse est grande. Pour déduire la fréquence, il suffit d’observer le graphique de la coordonnée en X et trouver ou il y a un pic!

https://www.youtube.com/watch?v=spUNpyF58BY&t=243s
Comme vous l’avez deviné, la somme de deux ondes de différentes fréquences fonctionne similairement! C’est à dire, dans le graphique de la coordonnée en X du centre de masse il y a deux pics. Chaque pic est égale à une fréquence qui compose l’onde.

https://www.youtube.com/watch?v=spUNpyF58BY&t=243s
Pour trouver le point du centre de masse plus précisément nous devons faire une intégrale d’un infinité de points sur la forme obtenue. Voici la fonction finale qui est utilisé afin de calculer les différentes fréquences sur le spectromètre.

https://www.youtube.com/watch?v=spUNpyF58BY&t=243s

https://www.mathworks.com/help/matlab/examples/fft-for-spectral-analysis.html
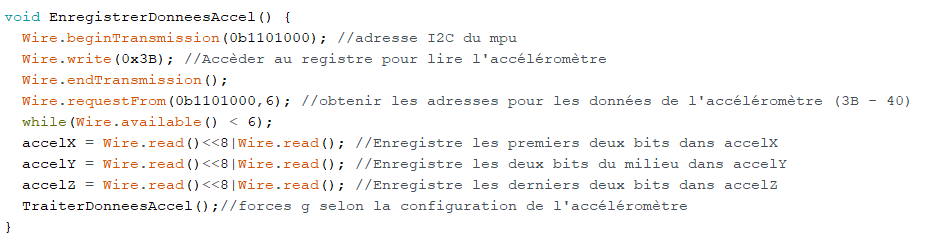
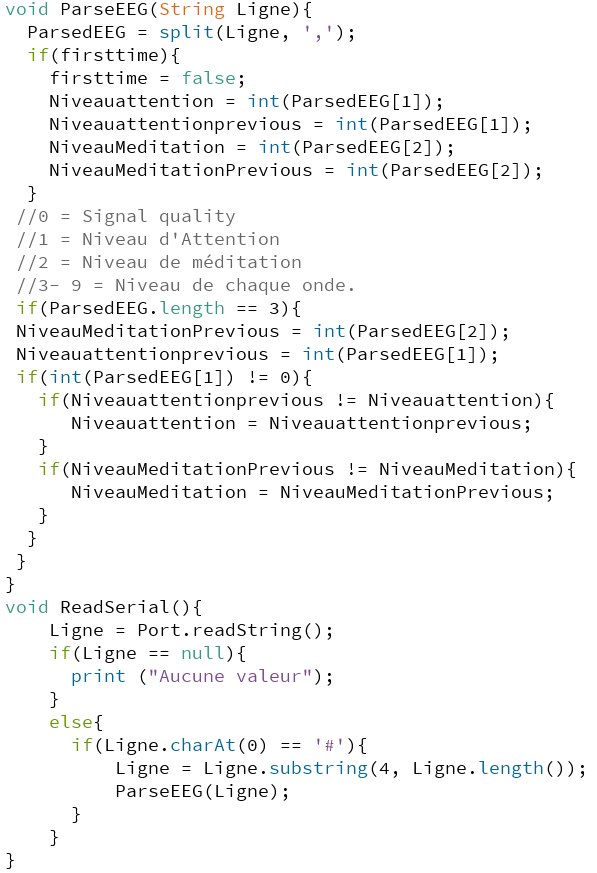
Comme vous l’avez deviné, la voix humaine est une composition de différentes fréquences. Pour déterminer quelle fréquences est la plus dominante, nous devons analyser d’avantage le graphique d’intensité en fonction de la fréquence. Par la suite nous prenons la valeur maximale d’intensité afin de déterminer la fréquence qui est la plus dominante. J’ai choisi de faire cette partie en processing puisqu’il existe une libraire qui utilise la transformation de fourrier. Voici comment déterminer la fréquence dominante :

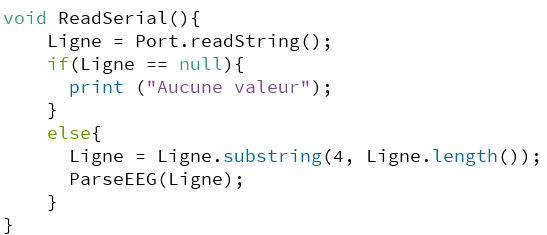
Nous parcourons les bandes données par la transformation de fourrier afin de trouver elle qui à l’intensité la plus grande. Par la suite, afin de déterminer la fréquence de celle-ci nous devons trouver la vitesse à laquelle nous prenons les données et le diviser par le nombres de bandes que nous avons.
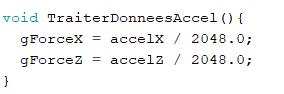
Lors des premiers essaies, nous avons déterminé que la fréquence obtenue est grandement influencé par le bruit ambiant. Nous nous sommes penché fortement sur ce sujet afin de comprendre comment éliminer le bruit ambiant et calculer la fréquence plus précisément. Pour ce faire, nous avons décidé de faire une moyenne en décibels du bruit ambiant. Quand nous avons un bruit qui nettement supérieur à la fréquence ambiante nous calculons la fréquence de celui-ci!

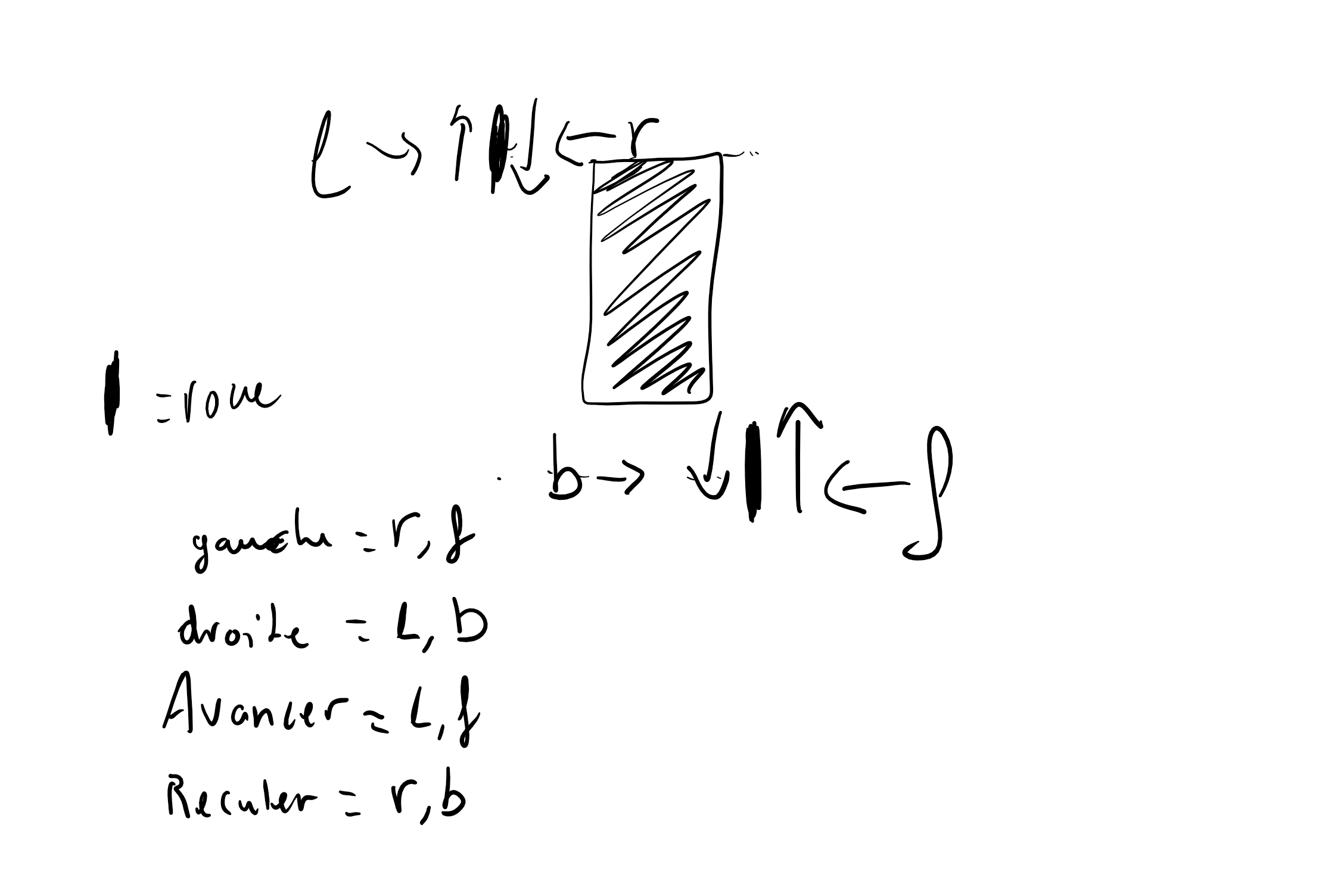
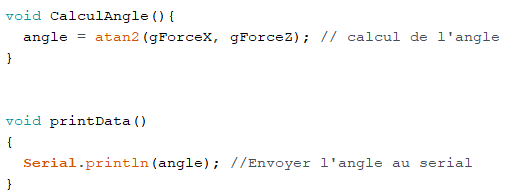
C’est assez simple comme fonction! La fonction CalculPower() envoie un chiffre entre 0 et 3 inclus au port serial dépendant de la fréquence déterminée. Le arduino comprends ces chiffres et fait avancer / reculer l’automobile en fonction du chiffre obtenue.