Le code pour obtenir l’angle d’inclinaison du senseur maintenant fait, il s’agit de traduire cette récupération de données qui est l’angle, dans un environnment graphique.
Voici la fonction draw() :
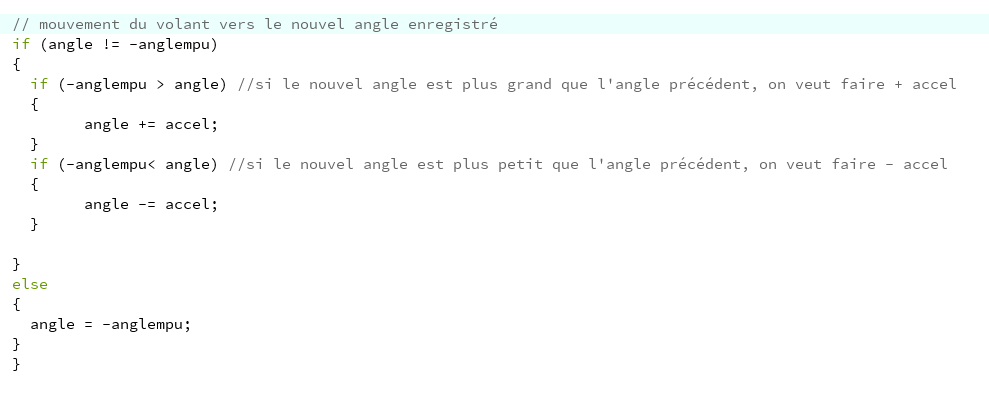
Premièrement, on doit dessiner le volant :

La fonction rotate permet de rotationner la forme complète qui est dessinée. L’angle change à chaque fois qu’on bouge le mpu6050.
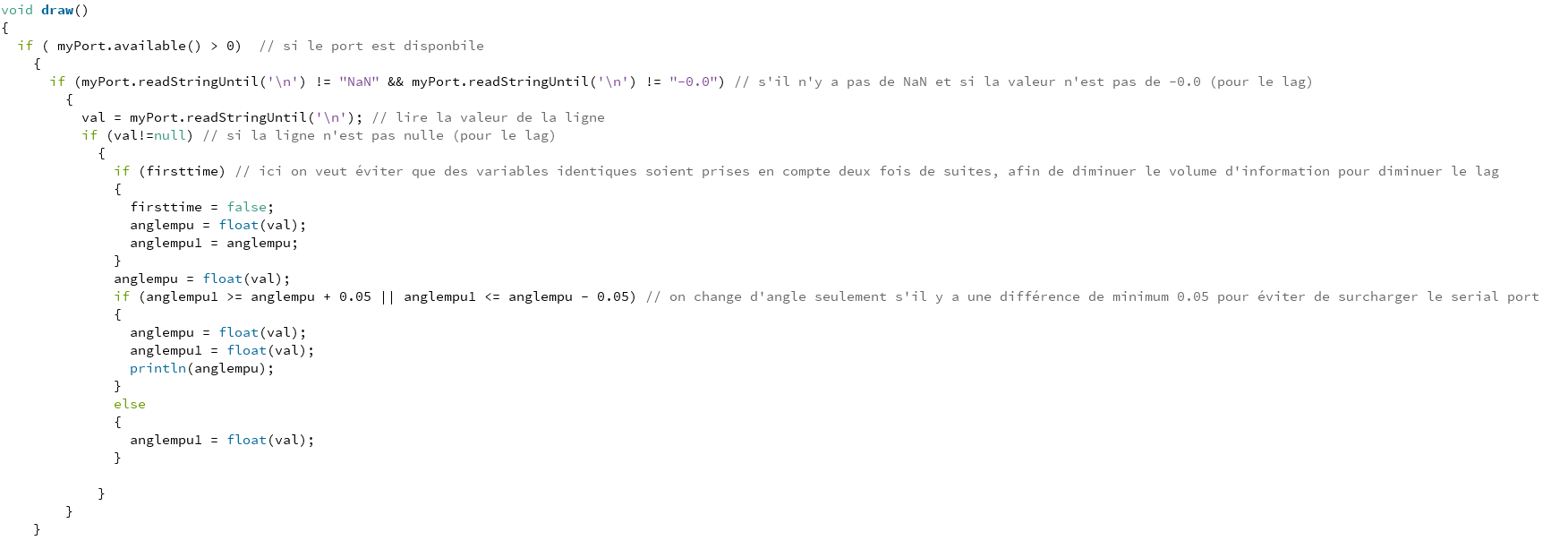
Comme on peut voir ci-dessus, on lit la valeur transmise par le mpu et on la soumet à des critères pour l’accepter ou pas. Ainsi, on diminue la charge d’information dans le serial port. Au tout début, lorsqu’on ne faisait que prendre la valeur du mpu et la transmettre pour faire bouger le volant il y avait beaucoup de lag. On a donc dû ajouter des barrières pour bloquer les surplus, comme expliqué dans le code ci-dessus.
Voici la fonction setup()
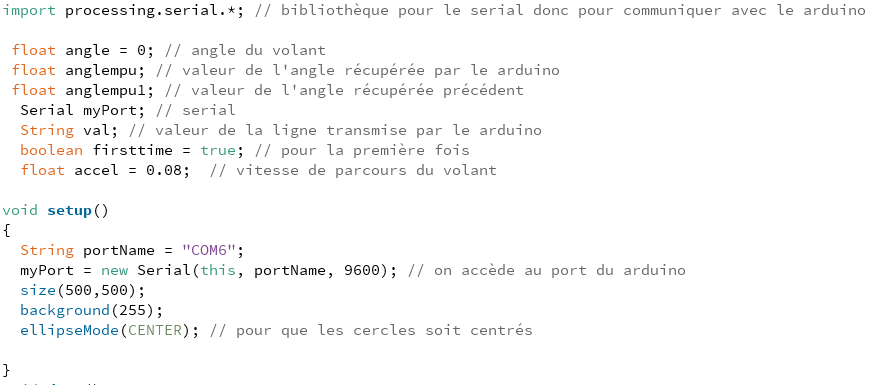
Ici, on commnuique avec le serial port pour obtenir les informations recueillies par le mpu6050 à travers le arduino.
Voici une vidéo du résultat :
